角度位移传感器:一种通过感知角度变化来确定物体位置的电子设备,广泛应用于各行业,如汽车、工程机械、航天装备、导弹、飞机雷达天线伺服系统,以及注塑机、木工机械、印刷机、电子尺、机器人、工程监测、电脑控制的运动器材等等需精准测距的场景。本文将详细解析角度位移传感器的工作原理及实际案例。
角度位移传感器原理
角度传感器主要用于精确监测角度变化。传感器中设有一个圆孔,可与乐高轴紧密结合。当联接到RCX模块后,每当轴旋转1/16圈,传感器便会自动进行一次数值统计。顺时针旋转,计数值逐渐递增;逆时针旋转则计数值逐渐递减。这个计算结果与传感器的初始位置密切相关,开始使用前需手动初始化,设定初始计数值为零。
角度位移传感器实例
以将角度传感器安装至电机与车轮间的传动轴为例,在获取数据过程中需考虑传动比因素。例如,假设在机器人设计中,电机与主轮比例为3:1。那么,角度传感器所读取的数据也要参照这样的传动比。具体计算公式如下: I = G × R,其中,G代表角度传感器与齿轮间的传动比率,R意味着角度传感器每旋转一周的计数值。以本案例为例,G=3, R恒等于16,所以可得公式:I=3×16=48。了解到这一点,我们便可以通过以下公式计算轮子每旋转一周所移动的距离:C = D × π,将传感器所记录的数据S乘以有效信息量C,除以I,即可得到轮子的真实运动距离T。若某传感器读取的数值为296,其对应的距离可以通过以上公式进行计算:T = S × C / I,这里的C = 81.6 × 3.14 ≈ 256.22 (单位为厘米),根据这个公式计算,我们得到:T = 296 × 256.22 / 48 ≈ 1580(单位为厘米)。至此,这就是我们通过角度位移传感器读取数据来精确定位轮子运动距离的全过程。
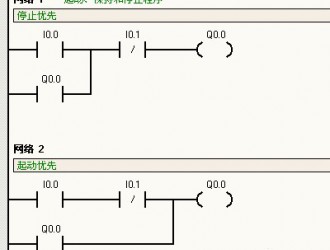
角度位移传感器物流运用角度传感器来感应障碍物非常实用,其原理很直观:若电机转动而齿轮不转,便表明已遭遇阻碍。这项技术简单易行且效果显著;唯一要注意的是,运动轮子不得产生过度滑动现象(否则将影响障碍物感知)。对此,可使用空转齿轮与电机相连以规避该问题,此时轮子非由电机推动,而是受装置运动牵引:驱动轮运动过程中,若惰轮暂停转动,则意味着遭遇障碍。
角度传感器对于诸多场景都十分适用:如控制手臂、头部及其他可动部件的位置等。值得一提的是,当设备运行速度过慢或过快时,可能对RCX的准确探测和计数造成影响。但实际问题并非来自于RCX本身,而涉嫌操作系统的设定:若速度超出预定范围,RCX便可能失掉部分重要信息。据史蒂夫·贝克先生的实验证实,每分钟50至300圈左右的转速较为适宜,在此区间内不易发生数据丢失问题。然而,当转速低于12rpm或高于1400rpm时,部分数据仍会有所丢失。对应的,当转速处在12rpm至50rpm期间,或是300rpm至1400rpm区间时,RCX亦偶尔面临数据缺失之困。